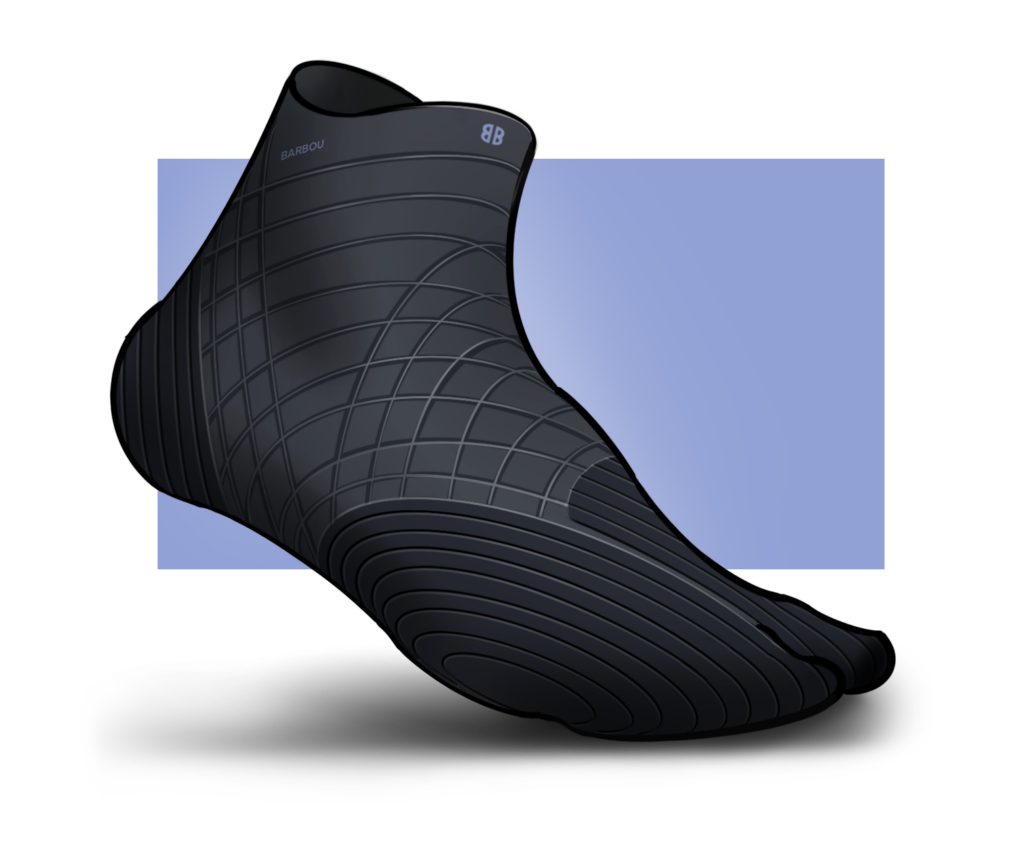
Industrial Design / Barefoot Climbing Shoe
Barbou is a custom-made exoskeleton designed for barefoot-optimized climbing. It adapts to the specific needs of the climber, offering the right balance of freedom and support while enhancing movement and correction.
Adaptive and Reactive
Instead of a static form, the design embraces fluctuating processes. Movement and constant change are key principles. Through adaptive responses to various situations, the shoe helps overcome climbing challenges in real time.
Targeted Stiffening and Force Transmission
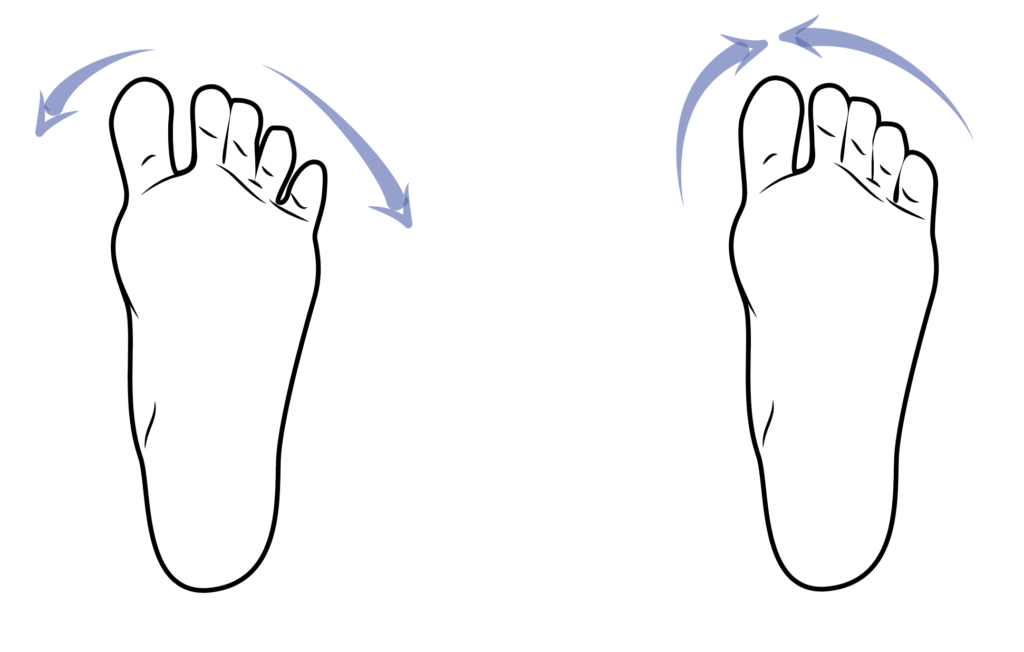
The shoe stiffens selectively under pressure, allowing the foot to push off difficult holds. When relaxed, it promotes natural foot movement, optimizing biomechanics without restriction.
Support and Correction
The shoe supports the foot as needed but minimizes unnecessary interference, gradually conditioning muscles and tendons while correcting imbalances. This helps prevent injuries and promotes continuous training.
Grip and Cushioning
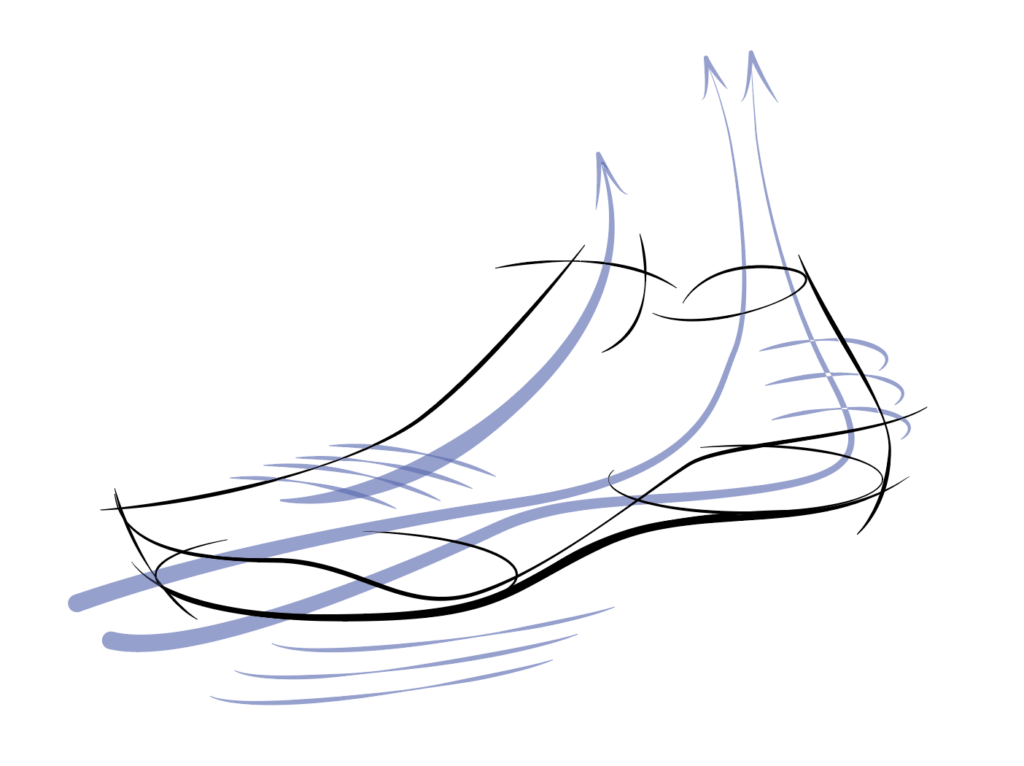
Strategic contraction in key areas increases grip and cushioning where needed, improving performance. The surface’s localized structuring enhances friction and shock absorption for more control.
Responsive and Active Areas
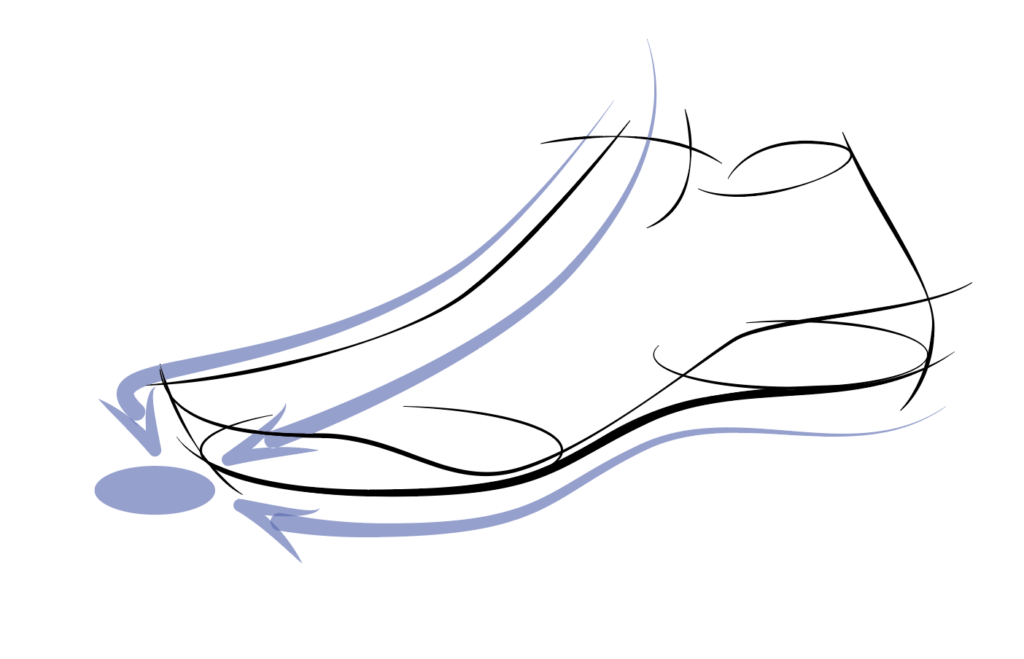
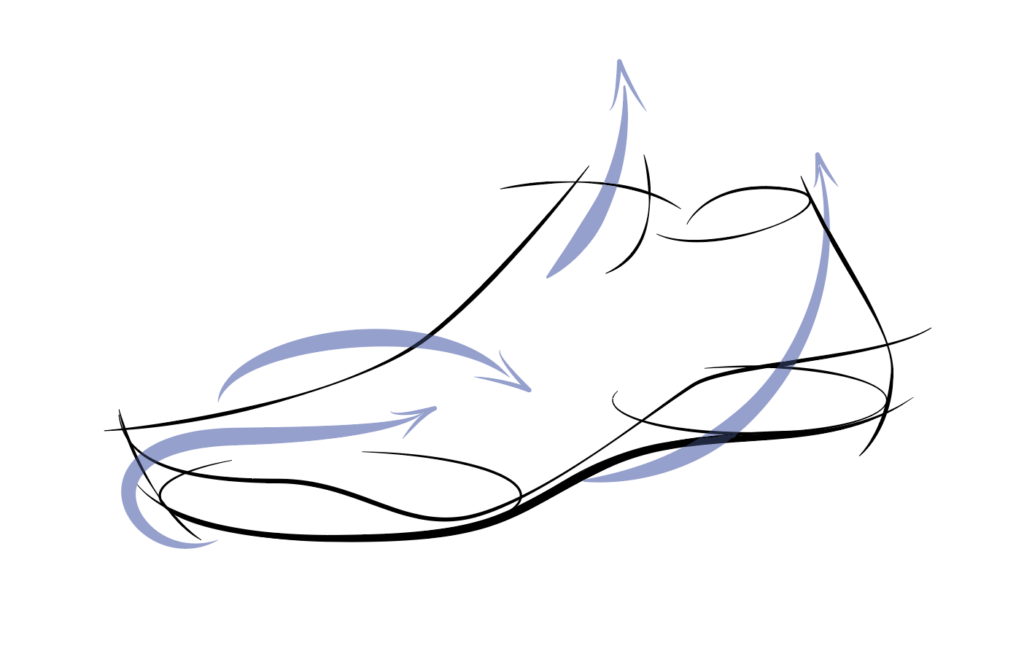
The material, form, and structure of the shoe vary depending on the situation, with adjustments made in real-time through sensors and actuators in custom-defined zones. These adaptations are built into the shoe’s geometry, responding to specific tasks and needs.
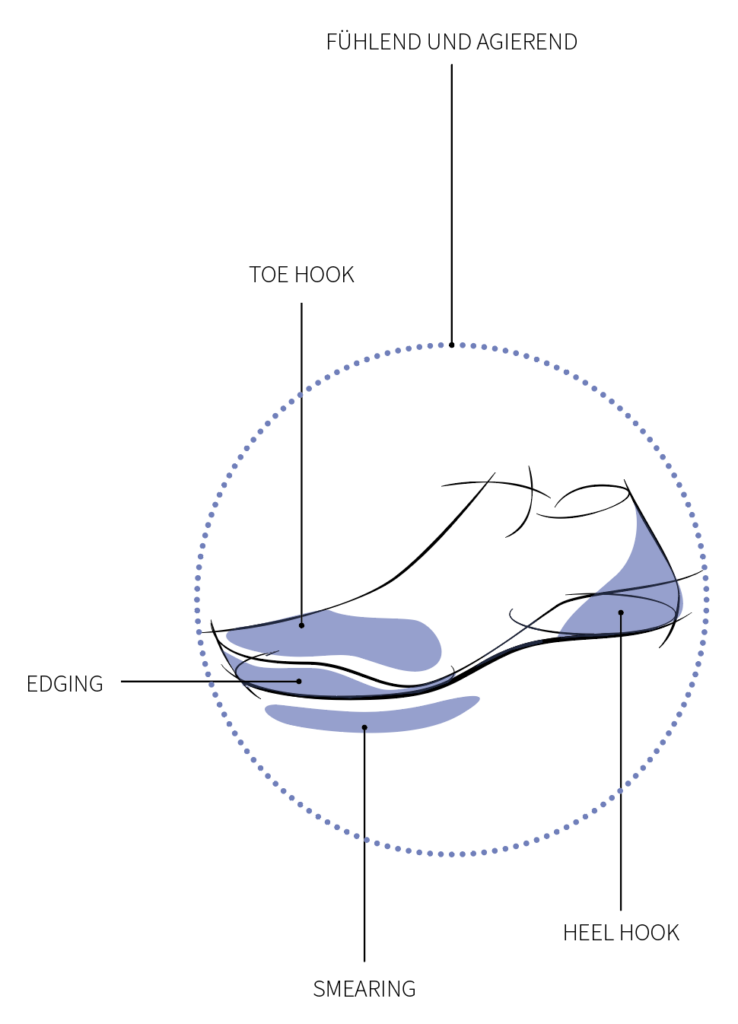
For instance, when standing on an edge, the shoe stiffens around the toes while lifting and supporting the arch, reducing pressure and redirecting forces over the foot’s surface.

Layer Structure and Function
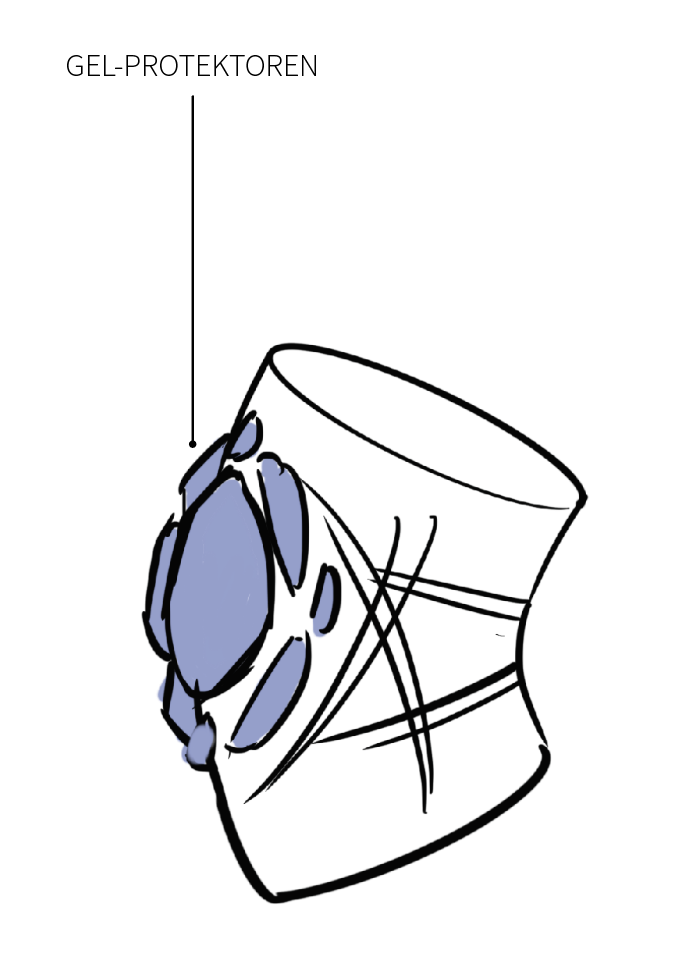
The shoe’s structure is made up of three interdependent layers, each with its own specific function, but all working together to adapt and respond to the body’s needs.
The first layer is an electronic skin, equipped with various sensors to detect changes in body movements and conditions such as temperature, pressure, and moisture. This layer’s auxetic geometry allows it to flexibly conform to the foot, with sensors connected in a network for precise feedback. Electroactive gel pads embedded in this layer absorb shock and adjust to external forces.
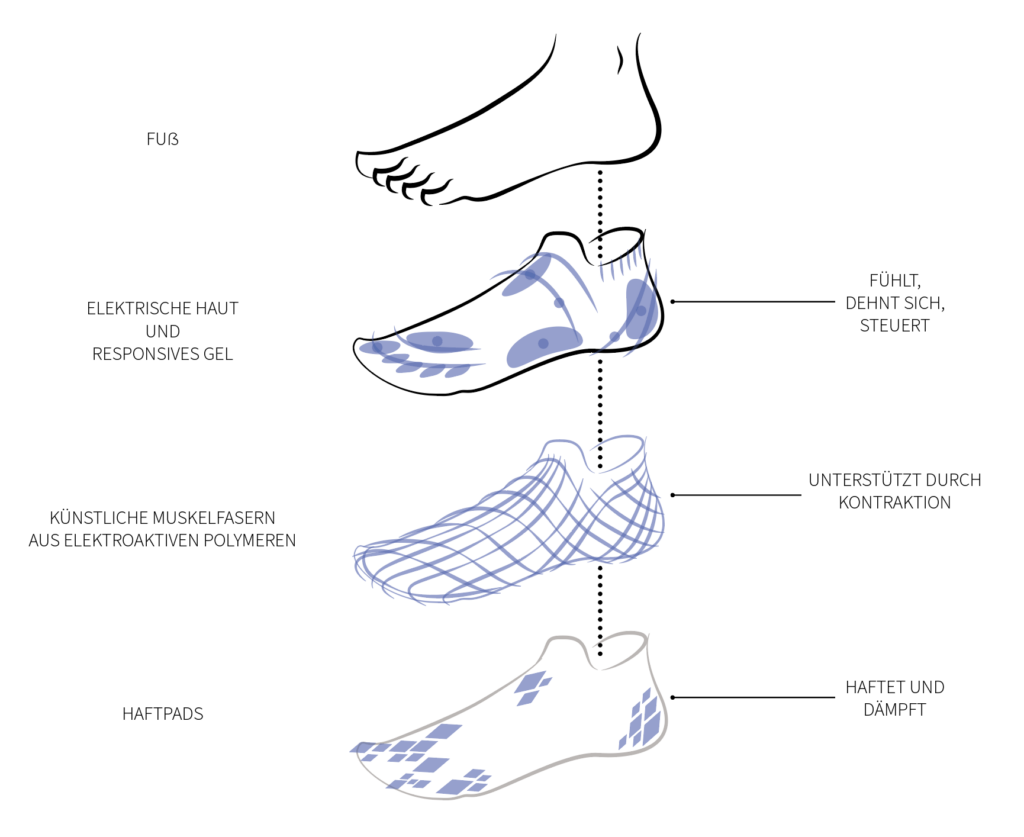
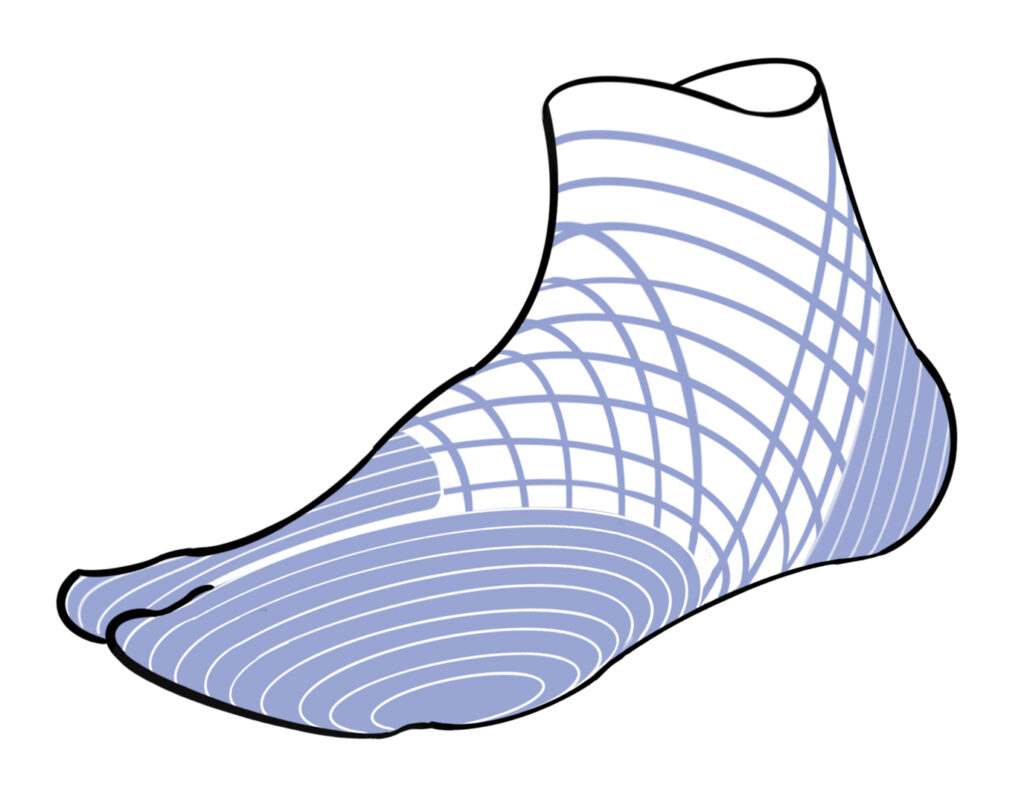
The second layer features artificial muscle fibers made from electroactive polymers that move in all directions. These fibers stretch and contract based on the design’s geometry, offering active support and movement where needed.
The final layer uses grip pads that interact with the environment, changing in size and stiffness to optimize force transmission and provide friction. They also work with the other layers to direct and control movement.
Harnessing Body Heat and Sweat
The technology’s energy requirements are minimized by using electroactive polymers that function through ion displacement. The body’s natural heat and sweat help generate an electrically conductive environment, further reducing energy consumption.
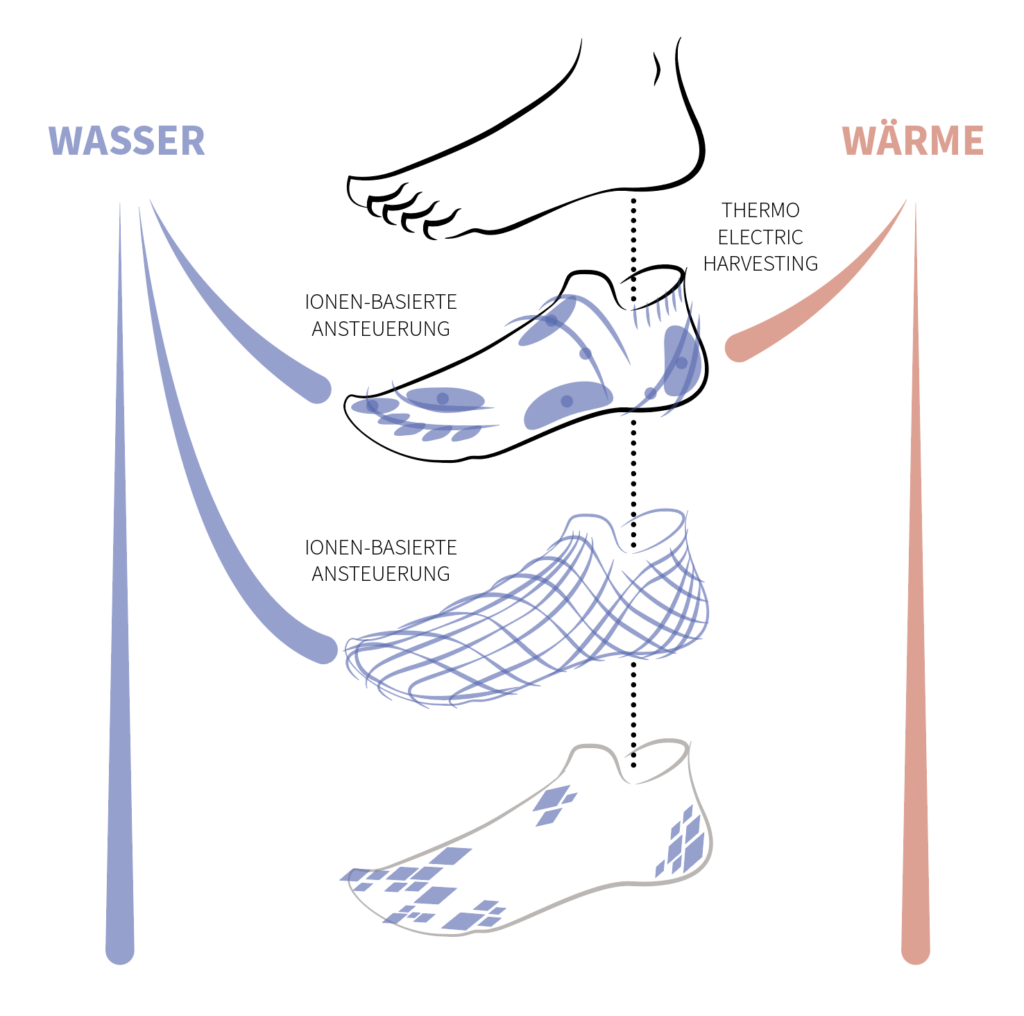
Thermoelectric harvesting technology uses body heat to produce enough power for the shoe’s adaptive functions.
Data-Driven Custom Production
A 3D foot scan and pressure mapping create a detailed analysis of the user’s biomechanics. Personalized data, such as weight, age, and activity level, is integrated into the design process.
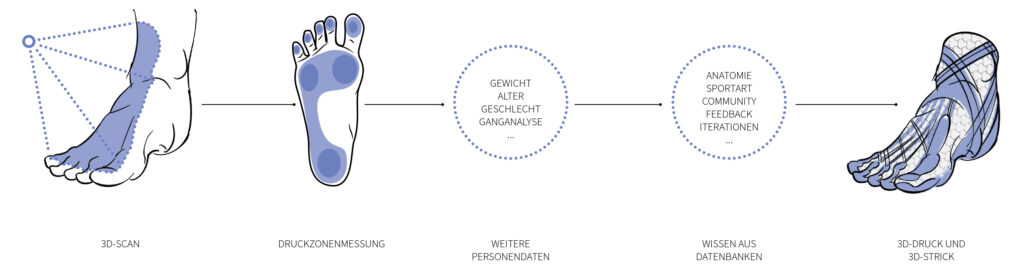
Through continuous data collection and analysis, the shoe evolves with each user, offering a custom solution that improves over time. 3D printing and knitting techniques are used to produce a personalized, one-of-a-kind shoe.
System Thinking – Expanding to Other Contexts
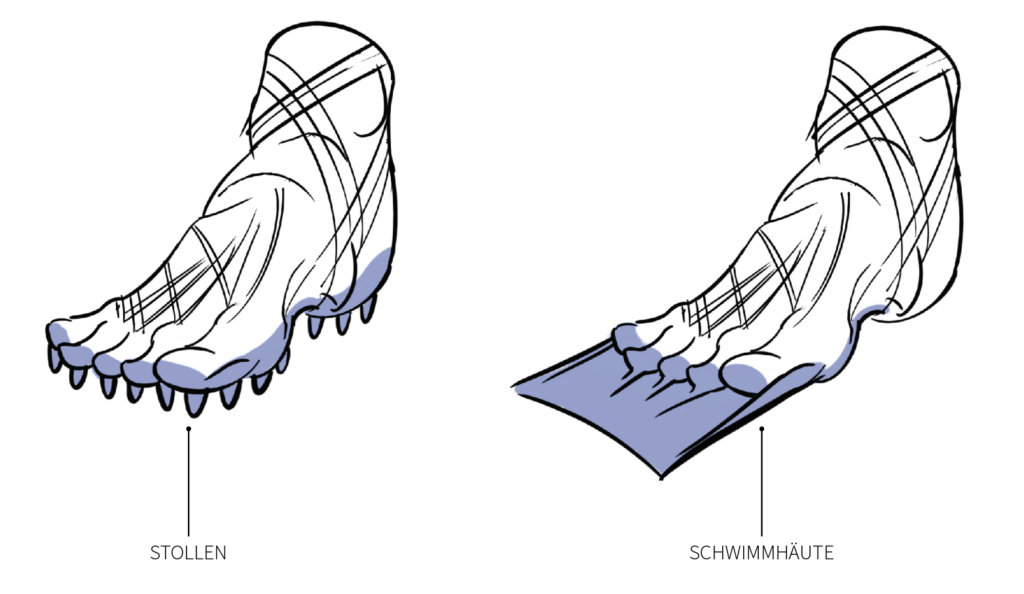
This concept can be expanded beyond climbing. It could adapt to other sports, such as football cleats or swim fins for specific activities like Swimrun. Additionally, it could support other body parts, like knees or back, with adaptive protection and muscle support.
In non-sport contexts, the system could be used to ease physical labor, protect workers, or assist in rehabilitation. Future applications include protecting astronauts from muscle atrophy during long space missions.