Industrial Design / Barefoot Climbing Shoe
Ein individuell angefertigtes Exoskelett für das Barfuß-optimierte Klettern, das auf die jeweiligen Anforderungen reagiert und sich dementsprechend anpasst. Dabei wird die nötige Bewegungsfreiheit und das passende Maß an Unterstützung und Korrektur ermöglicht.
Adaptiv und Reaktiv
Anstelle eines statischen Zustandes rücken fluktuierende Vorgänge. Dabei stehen Bewegung und stetiger Wandel als Leitmotive im Vordergrund. Durch die Adaption auf verschiedene Situationen und sofortige Reaktion werden die Herausforderungen des Kletterns bewältigt.
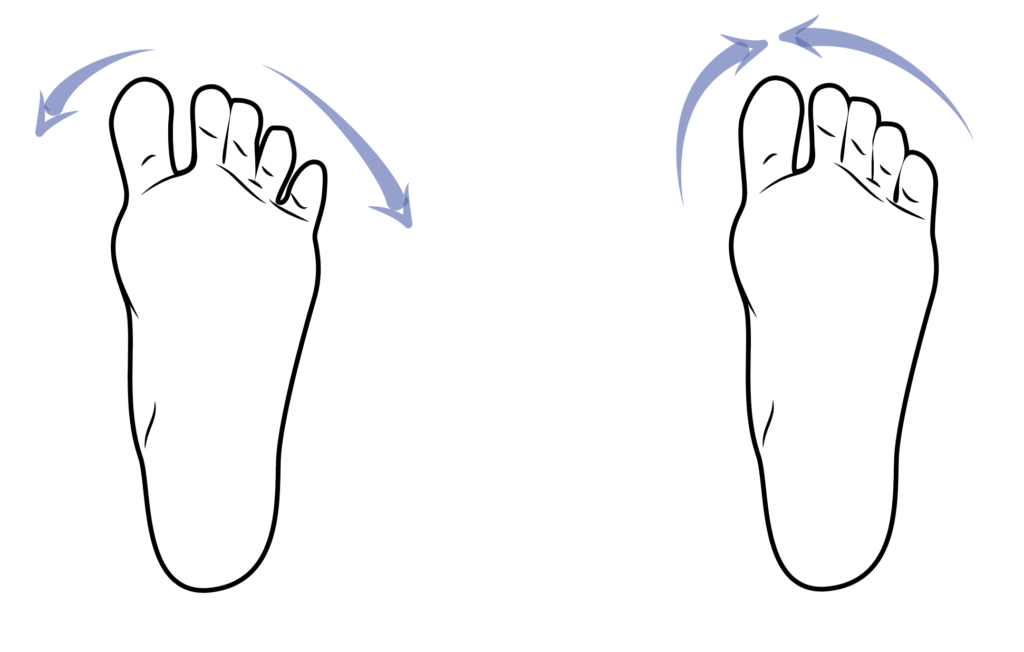
Die gezielte Versteifung und Verspannung des Fußes ermöglicht schwierige Tritte zu setzen. Wobei durch Entspannung die freie Bewegung des Fußes gefördert wird. Dadurch wird die Biomechanik des Fußes nicht behindert, sondern zum Vorteil genutzt.
Ausgelegt für langes, angenehmes Tragen, wird sowohl optimale Leistung an der Wand, als auch Regeneration in den Pausen realisiert.
GEZIELTE VERSTEIFUNG UND KRAFTABLEITUNG
Bei Belastung findet ein zielgerichtetes Versteifen statt um eine ideale Kraftableitung zu ermöglichen.
UNTERSTÜTZEN UND KORRIGIEREN
Die Bewegung des Fußes wird so viel wie nötig aber so wenig wie möglich unterstützt. Dadurch gewöhnen sich die Muskulatur und die Sehnen schonend an die Belastungen und der Fuß wird kontinuierlich trainiert. Vorhandene Fehlstellungen und Muskelimbalancen können durch beständige Korrekturen behandelt werden.
HAFTUNG UND DÄMPFUNG
Durch direktes Ansteuern und Kontraktion wird in beanspruchten Bereichen des Fußes mehr Haftreibung und Dämpfung erzeugt. Hierzu dient die lokale Strukturierung und Vergrößerung der Oberfläche.
FÜHLENDE UND AGIERENDE BEREICHE
Je nach Situation befindet sich die Materialität, Form und Struktur in verschiedenen Zuständen. Diese variiert dabei zur selben Zeit in unterschiedlichen Bereichen. Die Anpassungen erfolgen durch Sensoren und Aktoren in individuell analysierten Zonen. Die Möglichkeiten und Aufgaben werden dabei durch den Aufbau bestimmt und sozusagen in die Geometrie einprogrammiert.
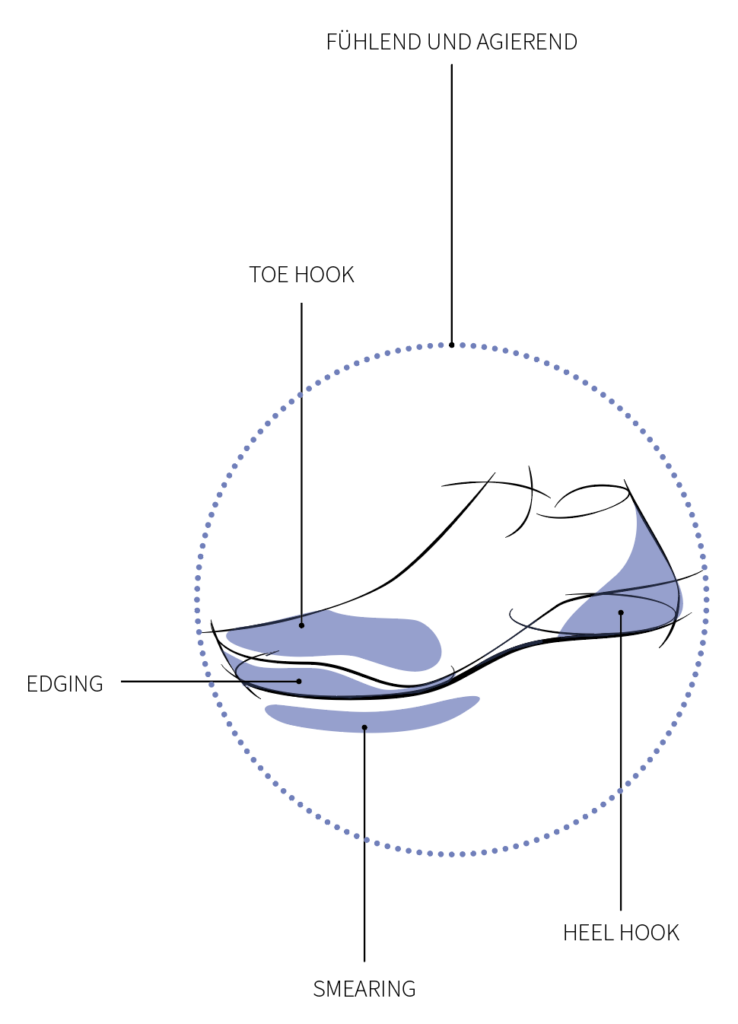
So ist es beispielsweise beim Stehen auf einer Kante (dem sog. ‚edging’) möglich, dass sich der Schuh zu den Zehen hin versteift und das Fußgewölbe hebt und stützt. Der Druck auf den Zehen wird gedämpft und die Kräfte über den Fußrücken abgeleitet.

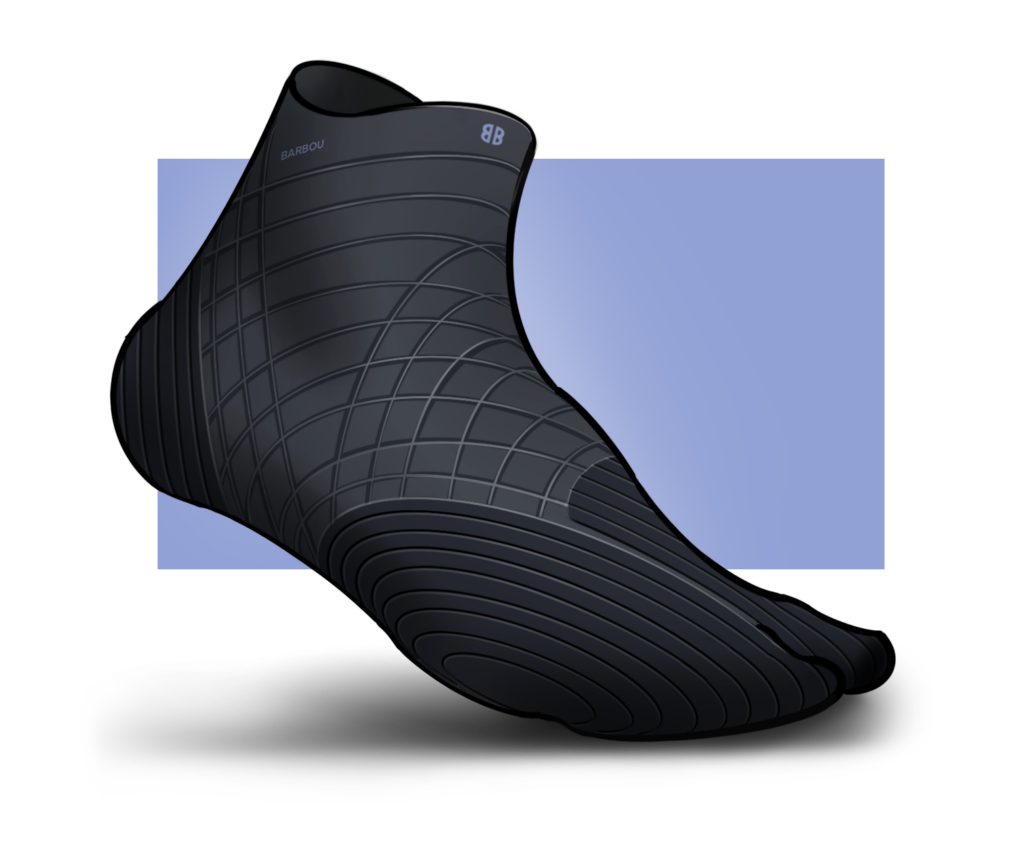
AUFBAU UND FUNKTION DER SCHICHTEN
Der technische Aufbau erfolgt in drei Schichten. Wobei jede Schicht spezifische Funktionen besitzt und damit eine Rolle für die Fähigkeiten sich zu verändern spielt. Die Schichten agieren nicht für sich alleine, sondern befinden sich immer im Zusammenspiel mit dem Ganzen. Sie ergänzen sich, sind stellenweise verwoben und durchdringen sich gegenseitig.
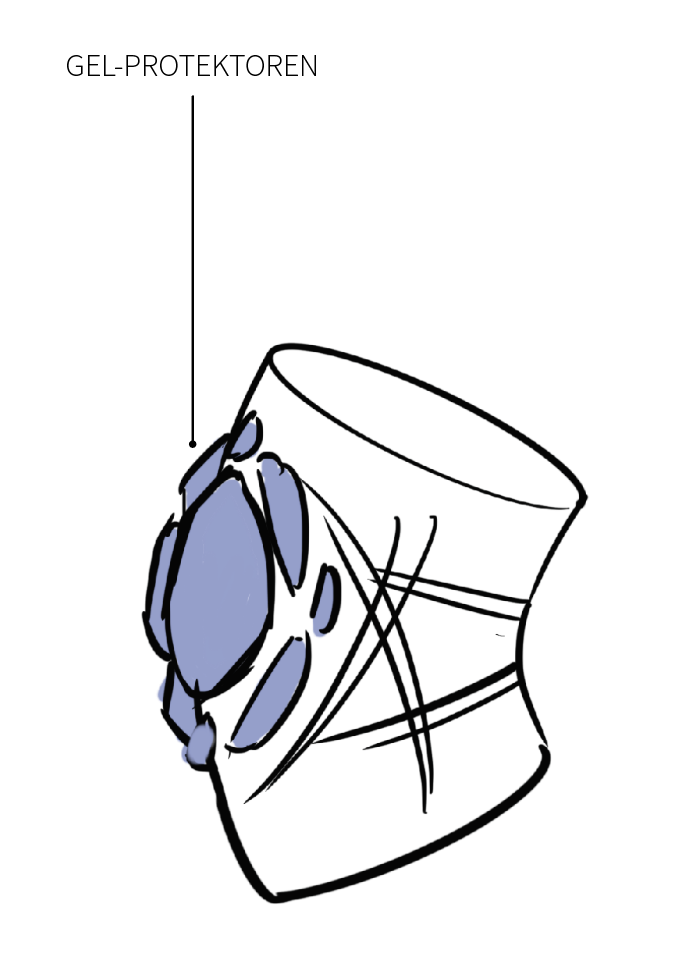
Die erste Ebene besteht aus einer elektrischen Haut. Diese vermittelt zwischen dem Fuß und den anderen Schichten. Ausgestattet mit diversen Sensoren, ist sie in der Lage Veränderungen im Körper und den Bewegungsabläufen zu spüren. Temperatur-, Beschleunigungs-, Druck- und Feuchtigkeitssensoren sind dafür an kritischen Punkten in der elektrischen Haut platziert. Der Aufbau erfolgt in einer auxetischen Geometrie, wodurch sie sich flexibel an den Fuß anpassen kann und die Sensoren in einem Netzwerk miteinander verbunden sind. Zusätzlich sind auf dieser Ebene des Aufbaus elektroaktive Gelpads eingelassen. Diese dehnen sich bei Bedarf aus und dämpfen die Krafteinwirkungen auf den Körper.
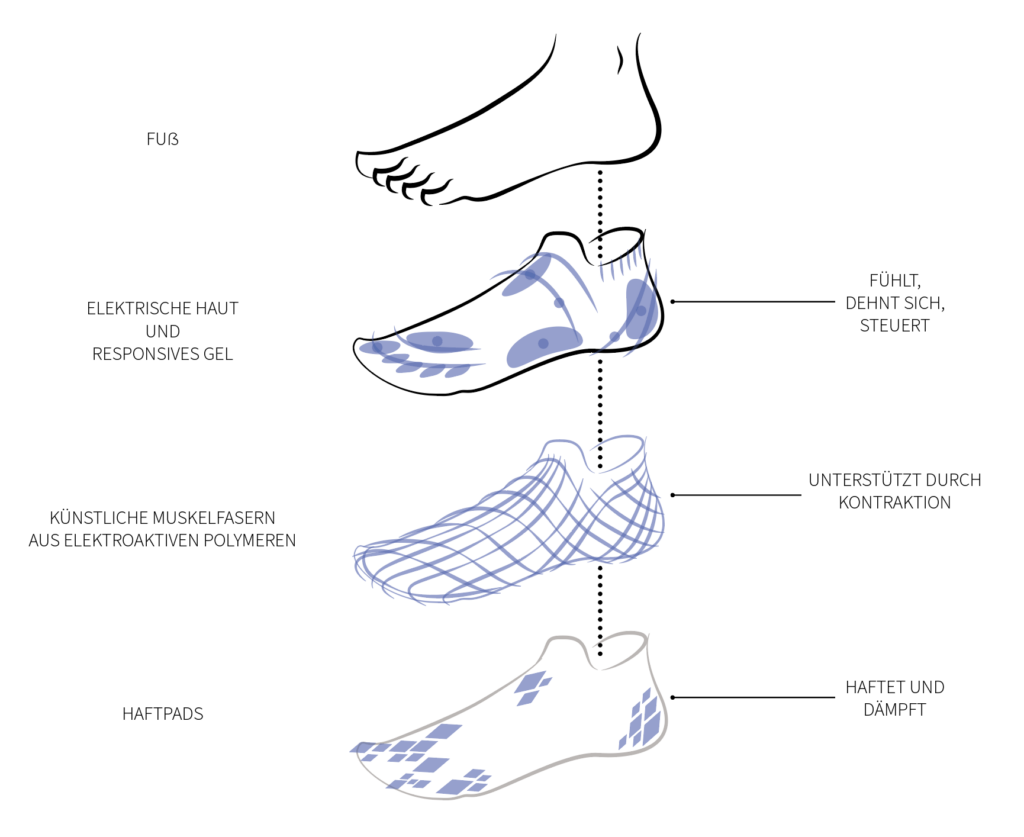
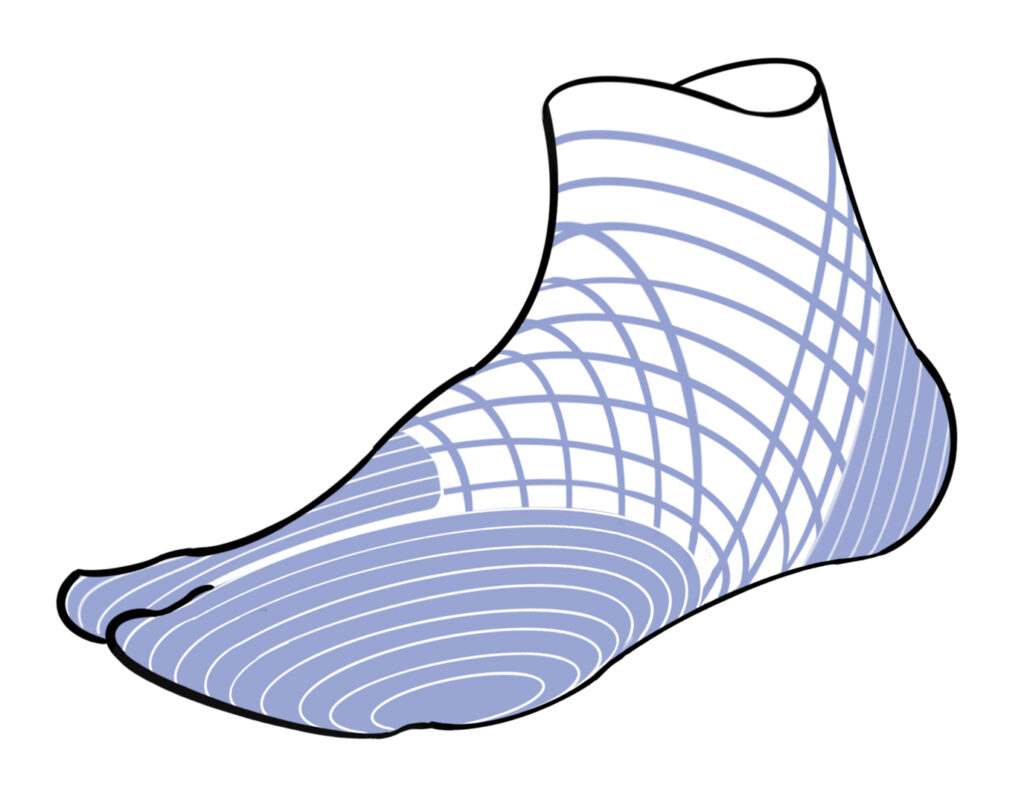
Auf der elektronischen Haut verlaufen die künstlichen Muskelfasern aus elektroaktiven Polymeren. Durch multidirektionales Verspinnen sind sie in der Lage sich in alle Richtungen zu bewegen. Diese werden zuvor durch die spezifische Geometrie bestimmt. So durchdringen sie an manchen Stellen die Haut, überlagern sich gegenseitig und sind miteinander verflochten. Steuerungselemente in der elektrischen Haut regen die Fasern in bestimmten Bereichen zur Dehnung und Stauchung an. Dadurch findet Bewegung und Unterstützung statt.
Die Muskelfasern sind letztlich mit Haftpads besetzt. Diese bilden den Kontakt zur Umgebung. Angeordnet sind sie gemäß den individuellen Anforderungen und können in Größe und Flächigkeit variieren. Abseits der Aufgabe die nötige Haftreibung herzustellen, sie sind imstande sich zu überlagern und gegenseitig zu versteifen. Dadurch können Kräfte ideal abgeleitet werden. Auch sie sind ein Akteur des Gesamten.
NUTZUNG VON KÖRPERWÄRME UND TRANSPIRATION
Die integrierte Technik benötigt Energie zum Ausführen ihrer Funktionen. Um den Energieverbrauch auf ein Minimum zu reduzieren werden ausschließlich solche elektroaktiven Polymere verwendet, die zur Ansteuerung die Verlagerung von Ionen nutzen. Der Prozess benötigt allerdings ein stromleitendes Milieu um zu funktionieren. Um eine solche Umgebung zu erzeugen, kann beispielsweise die körpereigene Transpiration genutzt werden. Dabei wird Salzwasser In Form von Schweiß vom Fuß über die elektrische Haut abgeleitet und verteilt.
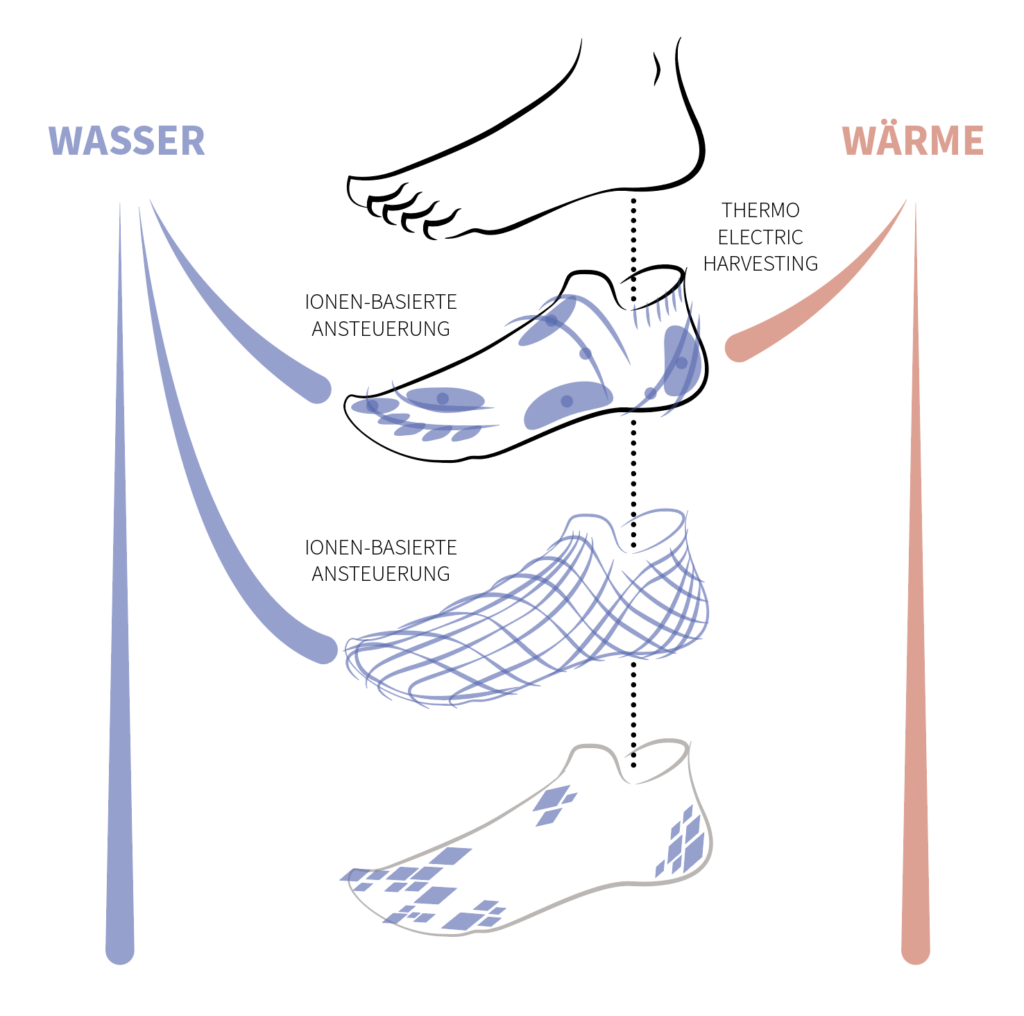
Zur Energiegewinnung dient letztlich eine Methode, die bereits Anwendung im Betreiben von Wearables findet. Das sogenannte ‚Thermo Electric Harvesting‘ bedient sich der Körperwärme um Strom zu erzeugen. Diese Energie würde ausreichen um die Bewegungen und Anpassungsprozesse zu ermöglichen.
INDIVIDUELLE, DATENGESTÜTZTE HERSTELLUNG
Zunächst wird ein 3D-Scan des Fußes angefertigt und eine Druckzonenmessung vorgenommen. Durch Kameras kann überdies eine Gang- und Bewegungsanalyse durchgeführt und die Biomechanik ermittelt werden. In Zukunft könnte dieser Prozess beispielsweise bereits beim Betreten des Ladens durch Sensoren am Boden und der Tür geschehen. Durch zusätzliche personenspezifische Daten wie Gewicht, Alter, Geschlecht usw. kann ein detailliertes Bild des Individuums mit seinen Bedürfnissen aufgestellt werden.
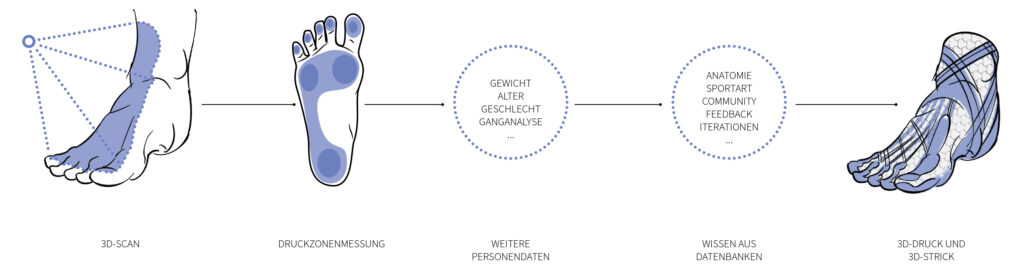
Mit Hilfe von Informationen aus Datenbanken wird die finale Form und Funktion weiter definiert. Dabei kommt beispielsweise Wissen über Anatomie und der spezifischen Sportart zu tragen. Zusätzlich können bereits gesammelte Daten vorheriger Kunden und Iterationen in den Entwurfsprozess einfließen. Demnach handelt es sich um einen offenen Prozess, der sich konstant durch weitere Erhebung von Daten optimiert.
Dadurch kann letztlich mit der Kombination aus 3D-Druck- und -Strickverfahren ein individuell angepasstes Unikat hergestellt werden.
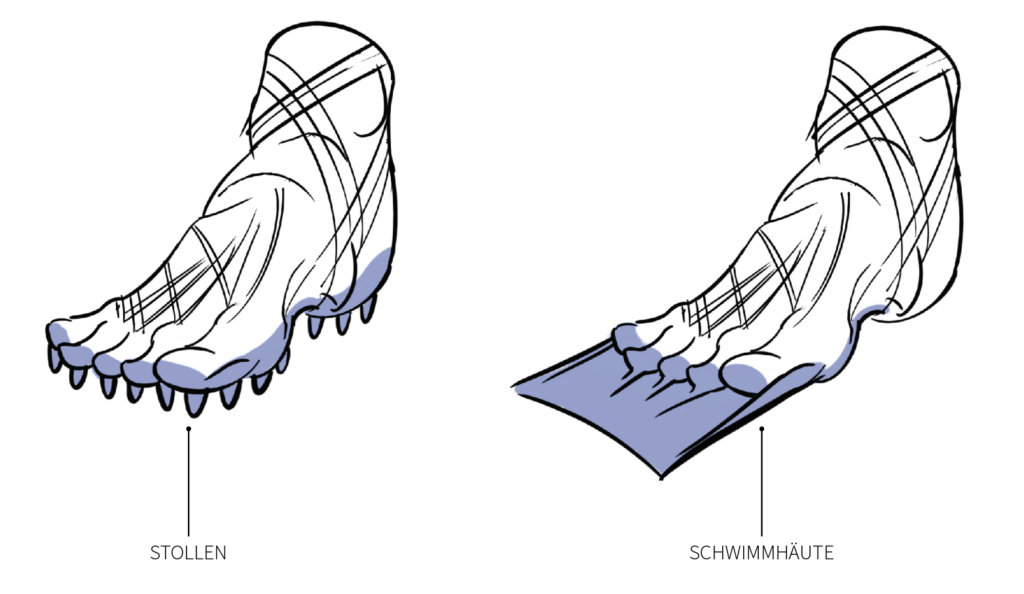
SYSTEMGEDANKE – VERSCHIEDENE KONTEXTE UND KÖRPERBEREICHE
Das vorliegende Konzept kann auf verschiedene Kontexte angepasst und erweitert werden. So ist es beispielsweise möglich andere Sportarten zu adressieren; wie durch Stollensohlen beim Fußball oder Schwimmflossen beim Tauchen. Es können auch lediglich Schwimmhäute zwischen den Zehen sein, um beispielsweise einer Mischform aus Lauf- und Schwimmsport zu dienen; dem sogenannten ‚Swimrun‘.
Weitergehend können andere Körperbereiche von dem stützenden und sich adaptierenden System profitieren. So können Knie mit nicht-newtonschen Gelpads vor Stürzen geschützt und mit künstlichen Muskeln unterstützt werden.
Abseits vom Sport-Kontext kann beispielsweise körperlich harte Arbeit erleichtert und Verletzungen vorgebeugt werden. So unterstützt ein Ganzkörperanzug in Zukunft Personen auf Baustellen bei ihrer Arbeit. Ein weiteres Zukunftsszenario ist durch die Möglichkeit des Rehabilitations- und Aufbautrainings gegeben. So können zum Beispiel Astronauten in Zukunft auf der Reise zum Mars vor Muskelschwund geschützt werden.